No final da década de 1950, antes da NASA ter qualquer intenção de ir à Lua - ou precisar de um computador para chegar lá - o Laboratório de Instrumentação do MIT havia projetado e construído uma pequena sonda protótipo que eles esperavam que um dia voasse para Marte (leia o fundo em parte 1 desta história aqui). Essa pequena sonda usava um pequeno computador rudimentar de uso geral para navegação, baseado nos sistemas inerciais para mísseis balísticos, submarinos e aeronaves que o laboratório havia projetado e construído para os militares desde a Segunda Guerra Mundial.
O pessoal do Instrumentation Lab achou que o conceito Mars Probe - e, em particular, o sistema de navegação - seria de interesse para os envolvidos nos incipientes esforços de exploração planetária, como a Força Aérea dos EUA e o Laboratório de Propulsão a Jato. Mas quando o Laboratório do MIT se aproximou deles, nenhuma das entidades estava interessada. A Força Aérea estava saindo do negócio espacial, e o JPL tinha planos de operar sua própria espaçonave planetária, navegando a partir do grande prato de comunicação Goldstone no deserto de Mojave. O radar de 26 metros havia sido construído para rastrear as primeiras sondas robóticas da Pioneer.
Tanto a Força Aérea quanto a JPL sugeriram que o laboratório conversasse com pessoas da recém-formada organização da NASA.
Os membros do laboratório visitaram Hugh Dryden, o administrador adjunto da NASA em Washington DC e Robert Chilton, que liderava o ramo de dinâmica de voo da NASA no Langley Research Center. Ambos pensaram que o laboratório havia feito um trabalho muito bom no design, especialmente no computador de orientação. A NASA decidiu doar ao laboratório US $ 50.000 para continuar seus estudos sobre o conceito.

Mais tarde, foi organizada uma reunião entre o líder do laboratório, o Dr. Charles Stark Draper e outros líderes da NASA para discutir os vários planos de longo alcance que a NASA tinha em mente e como os projetos do laboratório poderiam se encaixar em uma espaçonave pilotada por humanos. Após várias reuniões, determinou-se que o sistema deveria consistir em um computador digital de uso geral com controles e displays para os astronautas, um sextante espacial, uma unidade de orientação inercial com giroscópios e acelerômetros e todos os eletrônicos de apoio. Em todas essas discussões, todos concordaram que o astronauta deveria desempenhar um papel na operação da espaçonave e não apenas estar junto. E todo o pessoal da NASA gostou especialmente da capacidade de navegação autônoma, pois havia o medo de que a União Soviética pudesse interferir nas comunicações entre uma espaçonave americana e o solo, pondo em risco a missão e a vida dos astronautas.
Mas então, o Projeto Apollo nasceu. O presidente John F. Kennedy desafiou a NASA em abril de 1961 a pousar na Lua e retornar com segurança à Terra - tudo antes do final da década. Apenas onze semanas depois, em agosto de 1961, o primeiro contrato principal da Apollo foi assinado com o Laboratório de Instrumentação do MIT para construir o sistema de orientação e navegação.
"Tínhamos um contrato", disse Dick Battin, engenheiro do Laboratório que fazia parte da equipe de design da Mars Probe, "mas ... não tínhamos idéia de como faríamos esse trabalho, além de tentar modelá-lo após o nosso Mars. sonda. ”
Parte da tradição do Apollo Guidance Computer (AGC) é que algumas das especificações listadas na proposta de 11 páginas do laboratório foram basicamente retiradas do nada pelo Dr. Draper. Por falta de números melhores - e sabendo que precisaria caber dentro de uma espaçonave - ele disse que pesaria 100 libras, mede 1 pé cúbico de tamanho e usava menos de 100 watts de potência.
Mas naquela época, poucas especificações eram conhecidas sobre qualquer outro componente da Apollo ou espaçonave, pois nenhum outro contrato havia sido assinado, e a NASA ainda não havia decidido seu método (subida direta, Earth Orbit Rendezvous ou Lunar Orbit Rendezvous) e os tipos de naves espaciais para chegar à Lua.
"Dissemos: 'Não sabemos qual é o trabalho, mas este é o computador que temos, e trabalharemos nele, tentaremos expandi-lo, faremos tudo o que pudermos", disse Battin. . "Mas foi o único computador que alguém possui no país que poderia fazer esse trabalho ... qualquer que seja esse trabalho."

Battin lembrou que, a princípio, a opção de voar para a Lua seria um encontro em órbita terrestre, onde as várias partes da espaçonave seriam lançadas da Terra e combinadas na órbita terrestre e voariam para a Lua e aterrissariam ali como um todo. Mas, finalmente, o conceito de encontro com a órbita lunar venceu - onde o módulo de aterrissagem se separaria do Módulo de Comando e pousaria na Lua.
"Então, quando isso aconteceu, a questão era ... precisamos de um sistema de orientação novo e diferente para o Módulo Lunar do que o necessário para o Módulo de Comando?" Battin disse. “O que vamos fazer sobre isso? Convencemos a NASA a usar o mesmo sistema [computador] nas duas naves espaciais. Eles têm missões diferentes, mas poderíamos colocar um sistema duplicado no módulo lunar. Então foi isso que fizemos. "
O trabalho conceitual inicial no Computador de Orientação Apollo (AGC) prosseguiu rapidamente, com Battin e seus companheiros Milt Trageser, Hal Laning, David Hoag e Eldon Hall elaborando a configuração geral para orientação, navegação e controle.
Orientação significava direcionar o movimento de uma embarcação, enquanto a navegação se referia à determinação da posição atual com a maior precisão possível, em relação a um destino futuro. O controle se refere a direcionar os movimentos do veículo e, no espaço, as direções relacionadas à sua atitude (guinada, inclinação e rotação) ou velocidade (velocidade e direção). A experiência do MIT centrou-se em orientação e navegação, enquanto os engenheiros da NASA - especialmente aqueles que tinham experiência em trabalhar no Projeto Mercury - enfatizaram a orientação e o controle. Portanto, as duas entidades trabalharam juntas para criar as manobras que seriam necessárias com base nos dados dos giroscópios e acelerômetros e como tornar as manobras parte do computador e software.
Para o MIT Instrumentation Lab, uma grande preocupação com o Apollo Guidance Computer era a confiabilidade. O computador seria o cérebro da espaçonave, mas e se falhasse? Como a redundância era uma solução conhecida para o problema básico de confiabilidade, as pessoas do The Lab sugeriram a inclusão de dois computadores a bordo, com um como backup. Mas a aviação norte-americana - a empresa que construiu os módulos de comando e serviço da Apollo - estava tendo seus próprios problemas, atendendo aos requisitos de peso. A América do Norte rapidamente recusou os requisitos de tamanho e espaço de dois computadores, e a NASA concordou.
Outra idéia para aumentar a confiabilidade incluiu ter placas de circuito impresso e outros módulos a bordo da espaçonave, para que os astronautas pudessem fazer "manutenção em voo", substituindo as peças defeituosas durante o espaço. Mas a idéia de um astronauta abrindo um compartimento ou a placa do assoalho, procurando um defeito módulo e inserir uma placa de circuito sobressalente enquanto se aproximava da Lua parecia absurdo - embora essa opção tenha sido fortemente considerada por algum tempo.
"Dissemos: 'apenas tornaremos este computador confiável'", lembrou Battin. "Hoje, você será expulso do programa se disser que o construirá para que ele não falhe. Mas foi o que fizemos. "
No outono de 1964, o The Lab começou a projetar sua versão atualizada do AGC, principalmente para aproveitar a tecnologia aprimorada. Um dos aspectos mais desafiadores da missão Apollo foi a quantidade de computação em tempo real necessária para navegar na espaçonave até a Lua e voltar. Quando os engenheiros do laboratório começaram seu trabalho no projeto, os computadores ainda contavam com a tecnologia analógica. Os computadores analógicos não eram rápidos ou confiáveis o suficiente para uma missão na Lua.
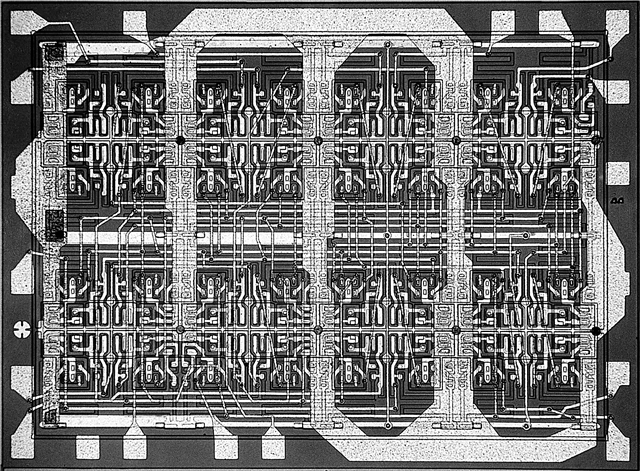
Os circuitos integrados, que acabavam de ser inventados em 1959, agora eram mais capazes, confiáveis e menores; eles poderiam substituir os projetos anteriores usando circuitos de transistor de núcleo, ocupando cerca de 40% menos espaço. Tão rapidamente quanto a tecnologia avançou desde que o MIT venceu o contrato da AGC em 1961, eles se sentiram confiantes de que o tempo de espera até o primeiro voo da Apollo permitiria maiores avanços na confiabilidade e, esperançosamente, reduções no custo. Com essa decisão, o AGC se tornou um dos primeiros computadores a usar circuitos integrados e, logo, mais de dois terços da produção total de microcircuitos dos EUA estava sendo usada para a construção de protótipos de computadores Apollo.
Legenda da imagem principal: Um circuito integrado inicial, conhecido como circuito integrado Fairchild 4500a. Imagem cortesia: Draper.
Embora muitos elementos de design para o hardware do computador tenham começado a se encaixar, um problema persistente em meados da década de 1960 tornou-se óbvio: memória. O design original, baseado no Mars Probe, tinha apenas 4 kilobytes de memória fixa e 256 de apagável. À medida que a NASA adicionava mais aspectos ao programa Apollo, os requisitos de memória continuavam aumentando, para 10 K, depois para 12, 16, 24 e, finalmente, para 36 Kilobytes de memória fixa e 2 K oferecidos.
O sistema que o Laboratório criou foi chamado de memória do cabo principal, com o software sendo cuidadosamente criado com fios de liga de níquel tecidos através dos minúsculos "anéis" magnéticos para criar a memória não apagável. Na linguagem dos computadores e zeros, se era um, corria pela rosquinha; se fosse zero, o fio corria em torno dele. Para um componente de memória, foram necessários feixes de 800 metros de fio trançado através de 512 núcleos magnéticos. Um módulo pode armazenar mais de 65.000 informações.
Battin chamou o processo de construção da memória central de método LOL.

"Velhinhas", disse ele. "As mulheres da fábrica da Raytheon literalmente teceriam o software nessa memória de corda central".
Embora as mulheres realizassem principalmente a tecelagem, elas não eram necessariamente velhas. Raytheon empregou muitos ex-trabalhadores têxteis, especialistas em tecelagem, que precisavam seguir instruções detalhadas para tecer os fios.
Quando as memórias dos cabos principais foram construídas pela primeira vez, o processo foi bastante trabalhoso: duas mulheres sentavam uma em frente à outra, teciam à mão uma corrente de fios através de minúsculos núcleos magnéticos, empurrando uma sonda com o fio preso de um lado para o outro. Em 1965, um método mais mecânico de tecer os fios foi implementado, novamente, com base em máquinas têxteis usadas na indústria de tecelagem da Nova Inglaterra. Mas, ainda assim, o processo foi extremamente lento e um programa pode levar várias semanas ou até meses para ser produzido, com mais tempo necessário para testá-lo. Qualquer erro na tecelagem significava que teria que ser refeito. O computador do módulo de comando continha seis conjuntos de módulos de corda central, enquanto o computador do módulo lunar possuía sete.
No total, havia aproximadamente 30.000 peças no computador. Cada componente seria submetido a um teste elétrico e a um teste de estresse. Qualquer falha exigia a rejeição do componente.
"Embora a memória fosse confiável", disse Battin, "o que a NASA não gostou foi o fato de que, desde muito cedo, você precisava decidir qual seria o programa de computador. Eles nos perguntaram: 'E se tivéssemos uma mudança de última hora?' E dissemos que não podemos ter alterações de última hora e, a qualquer momento que você quiser alterar a memória, significa um desvio de seis semanas, no mínimo. Quando a NASA disse que era intolerável, dissemos a eles: "Bem, é assim que este computador é, e não há outro computador como esse que você possa usar".
Enquanto projetar e construir todo o hardware apresentava desafios, à medida que o trabalho avançava no AGC entre 1965 e 1966, destacava-se a magnitude e a complexidade de outro aspecto: a programação do software. Tornou-se o principal problema de definição do computador, atendendo a cronogramas e especificações.
Toda a programação era basicamente feita no nível zeros, na linguagem assembly. Ao projetar o software para realizar tarefas complicadas, os engenheiros de software precisaram apresentar maneiras engenhosas de ajustar o código às restrições de memória. E, é claro, nada disso já havia sido feito antes, pelo menos não nesse nível de escala e complexidade. A qualquer momento, o AGC pode ter que coordenar várias tarefas ao mesmo tempo: tirar as leituras do radar, calcular a trajetória, executar correções de erros nos giroscópios, determinar quais propulsores devem ser disparados, além de transmitir dados às estações terrestres da NASA e receber novas informações dos poltronas .

Hal Laning concebeu o que chamou de programa executivo, que atribuiu tarefas a diferentes prioridades e permitiu que tarefas de alta prioridade se acomodassem antes das de baixa prioridade. O computador pode alocar memória entre diferentes tarefas e acompanhar onde uma tarefa foi interrompida.
A equipe de software do laboratório começou a projetar intencionalmente o software com um recurso de agendamento prioritário que pode identificar os comandos mais importantes e permitir que eles sejam executados sem interrupção de comandos menos importantes.
No entanto, no outono de 1965, tornou-se óbvio para a NASA que o computador Apollo estava com sérios problemas, pois o desenvolvimento dos programas estava significativamente atrasado. O fato de uma quantidade relativamente desconhecida chamada "software" poder atrasar todo o programa Apollo não foi bem recebido pela NASA.
Próximo: Parte 3, descobrindo tudo.